作者留言
最近忙着机械臂的开发,更新不是很频繁,手眼标定和路径规划这两块从啥也不懂到有了一定的成果,付出很多心血,因此决定开一个新系列总结一下开发的心路历程。废话少说,先从深度相机开始:
准备工作
- 首先,安装 Python 3.10和虚拟环境。
- 安装 python 包:
pip3 install pyorbbecsdk-2.0.10-cp310-cp310-win_amd64.whl - 导航到 site-packages/pyorbbec/examples 目录并安装所需的依赖项:
pip3 install -r requirements.txt
获取色彩图
import cv2
from pyorbbecsdk import *
from utils import frame_to_bgr_image
ESC_KEY = 27
def main():
config = Config()
pipeline = Pipeline()
try:
profile_list = pipeline.get_stream_profile_list(OBSensorType.COLOR_SENSOR)
try:
color_profile: VideoStreamProfile = profile_list.get_video_stream_profile(640, 0, OBFormat.RGB, 30)
except OBError as e:
print(e)
color_profile = profile_list.get_default_video_stream_profile()
print("color profile: ", color_profile)
config.enable_stream(color_profile)
except Exception as e:
print(e)
return
pipeline.start(config)
while True:
try:
frames: FrameSet = pipeline.wait_for_frames(100)
if frames is None:
continue
color_frame = frames.get_color_frame()
if color_frame is None:
continue
# covert to RGB format
color_image = frame_to_bgr_image(color_frame)
if color_image is None:
print("failed to convert frame to image")
continue
cv2.imshow("Color Viewer", color_image)
key = cv2.waitKey(1)
if key == ord('q') or key == ESC_KEY:
break
except KeyboardInterrupt:
break
cv2.destroyAllWindows()
pipeline.stop()
if __name__ == "__main__":
main()获取深度图
import time
import cv2
import numpy as np
from pyorbbecsdk import *
ESC_KEY = 27
PRINT_INTERVAL = 1 # seconds
MIN_DEPTH = 20 # 20mm
MAX_DEPTH = 10000 # 10000mm
class TemporalFilter:
def __init__(self, alpha):
self.alpha = alpha
self.previous_frame = None
def process(self, frame):
if self.previous_frame is None:
result = frame
else:
result = cv2.addWeighted(frame, self.alpha, self.previous_frame, 1 - self.alpha, 0)
self.previous_frame = result
return result
def main():
config = Config()
pipeline = Pipeline()
temporal_filter = TemporalFilter(alpha=0.5)
try:
profile_list = pipeline.get_stream_profile_list(OBSensorType.DEPTH_SENSOR)
assert profile_list is not None
depth_profile = profile_list.get_default_video_stream_profile()
assert depth_profile is not None
print("depth profile: ", depth_profile)
config.enable_stream(depth_profile)
except Exception as e:
print(e)
return
pipeline.start(config)
last_print_time = time.time()
while True:
try:
frames = pipeline.wait_for_frames(100)
if frames is None:
continue
depth_frame = frames.get_depth_frame()
if depth_frame is None:
continue
depth_format = depth_frame.get_format()
if depth_format != OBFormat.Y16:
print("depth format is not Y16")
continue
width = depth_frame.get_width()
height = depth_frame.get_height()
scale = depth_frame.get_depth_scale()
depth_data = np.frombuffer(depth_frame.get_data(), dtype=np.uint16)
depth_data = depth_data.reshape((height, width))
depth_data = depth_data.astype(np.float32) * scale
depth_data = np.where((depth_data > MIN_DEPTH) & (depth_data < MAX_DEPTH), depth_data, 0)
depth_data = depth_data.astype(np.uint16)
# Apply temporal filtering
depth_data = temporal_filter.process(depth_data)
center_y = int(height / 2)
center_x = int(width / 2)
center_distance = depth_data[center_y, center_x]
current_time = time.time()
if current_time - last_print_time >= PRINT_INTERVAL:
print("center distance: ", center_distance)
last_print_time = current_time
depth_image = cv2.normalize(depth_data, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)
depth_image = cv2.applyColorMap(depth_image, cv2.COLORMAP_JET)
cv2.imshow("Depth Viewer", depth_image)
key = cv2.waitKey(1)
if key == ord('q') or key == ESC_KEY:
break
except KeyboardInterrupt:
break
cv2.destroyAllWindows()
pipeline.stop()
if __name__ == "__main__":
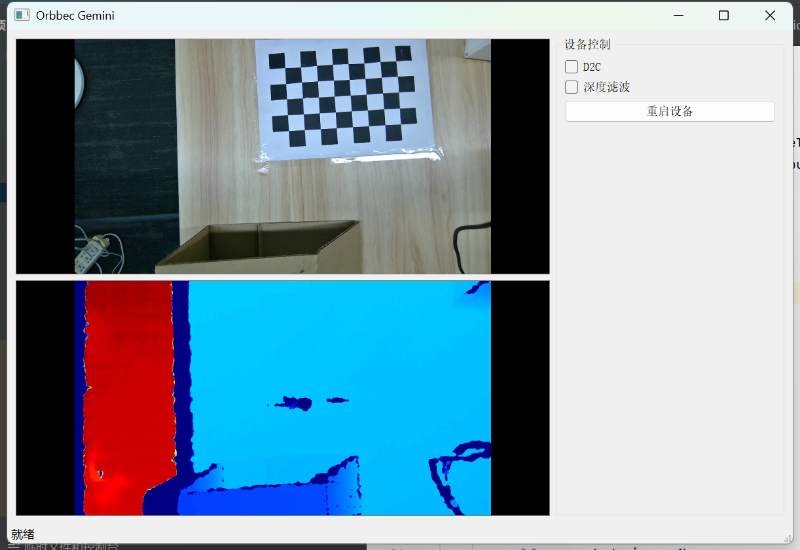
main()同时显示深度和色彩图
import sys
import cv2
import numpy as np
from PyQt5.QtWidgets import (
QApplication, QMainWindow, QWidget, QLabel, QVBoxLayout, QHBoxLayout,
QFormLayout, QPushButton, QCheckBox, QGroupBox
)
from PyQt5.QtCore import Qt, QTimer
from PyQt5.QtGui import QImage, QPixmap
from pyorbbecsdk import *
from utils import frame_to_bgr_image
MIN_DEPTH = 10
MAX_DEPTH = 1300
RGB_WIDTH, RGB_HEIGHT = 848, 480
DEPTH_WIDTH, DEPTH_HEIGHT = 848, 480
class OrbbecCameraApp(QMainWindow):
def __init__(self):
super().__init__()
self.pipeline = None
self.context = None
self.current_device = None
self.rgb_img = None
self.depth_mm = None
self.frames = None
self.init_ui()
self.init_camera()
self.setup_data_processing()
def init_ui(self):
self.setWindowTitle("Orbbec Gemini")
self.setGeometry(100, 100, 1200, 700)
main_widget = QWidget()
self.setCentralWidget(main_widget)
main_layout = QHBoxLayout(main_widget)
video_panel = QVBoxLayout()
self.rgb_display = self.create_video_label("RGB 视频流")
self.depth_display = self.create_video_label("深度图")
video_panel.addWidget(self.rgb_display)
video_panel.addWidget(self.depth_display)
control_panel = self.create_control_panel()
main_layout.addLayout(video_panel, 70)
main_layout.addWidget(control_panel, 30)
self.statusBar().showMessage("就绪")
def create_video_label(self, title):
label = QLabel(title)
label.setAlignment(Qt.AlignCenter)
label.setMinimumSize(640, 360)
label.setStyleSheet("border: 1px solid gray; background-color: black; color: white; font-size: 16px;")
return label
def create_control_panel(self):
panel = QGroupBox("设备控制")
layout = QFormLayout()
self.auto_D2D_cb = QCheckBox("D2C")
self.auto_D2D_cb.stateChanged.connect(self.toggle_D2D)
self.soft_filter_cb = QCheckBox("深度滤波")
self.soft_filter_cb.stateChanged.connect(self.toggle_soft_filter)
self.reboot_btn = QPushButton("重启设备", clicked=self.reboot_device)
layout.addRow(self.auto_D2D_cb)
layout.addRow(self.soft_filter_cb)
layout.addRow(self.reboot_btn)
panel.setLayout(layout)
return panel
def init_camera(self):
try:
self.context = Context()
devices = self.context.query_devices()
if devices.get_count() == 0:
self.show_status("未检测到设备")
return False
self.current_device = devices.get_device_by_index(0)
self.init_pipeline()
self.timer = QTimer(self)
self.timer.timeout.connect(self.process_frames)
self.timer.start(30)
return True
except OBError as e:
self.show_error(f"初始化失败: {str(e)}")
return False
def init_pipeline(self):
try:
self.pipeline = Pipeline()
config = Config()
color_profiles = self.pipeline.get_stream_profile_list(OBSensorType.COLOR_SENSOR)
self.color_profile = color_profiles.get_video_stream_profile(RGB_WIDTH, RGB_HEIGHT, OBFormat.RGB, 30)
config.enable_stream(self.color_profile)
depth_profiles = self.pipeline.get_stream_profile_list(OBSensorType.DEPTH_SENSOR)
self.depth_profile = depth_profiles.get_video_stream_profile(DEPTH_WIDTH, DEPTH_HEIGHT, OBFormat.Y16, 30)
config.enable_stream(self.depth_profile)
self.pipeline.enable_frame_sync()
self.pipeline.start(config)
return True
except OBError as e:
self.show_error(f"流配置错误: {str(e)}")
return False
def setup_data_processing(self):
self.depth_scale = 0.1
self.prev_depth = None
self.alpha = 0.5
def process_frames(self):
try:
self.frames = self.pipeline.wait_for_frames(100)
if not self.frames:
return
color_frame = self.frames.get_color_frame()
depth_frame = self.frames.get_depth_frame()
if color_frame:
self.rgb_img = frame_to_bgr_image(color_frame)
self.display_image(self.rgb_img, self.rgb_display)
if depth_frame:
h, w = depth_frame.get_height(), depth_frame.get_width()
self.depth_scale = depth_frame.get_depth_scale()
raw_depth = np.frombuffer(depth_frame.get_data(), dtype=np.uint16).reshape((h, w))
f_depth = raw_depth.astype(np.float32) * self.depth_scale
if self.prev_depth is not None:
filtered = cv2.addWeighted(f_depth, self.alpha, self.prev_depth, 1 - self.alpha, 0)
else:
filtered = f_depth
self.prev_depth = filtered.copy()
valid_depth = np.where((filtered > MIN_DEPTH) & (filtered < MAX_DEPTH), filtered, 0)
depth_vis = cv2.normalize(valid_depth, None, 0, 255, cv2.NORM_MINMAX, cv2.CV_8U)
depth_color = cv2.applyColorMap(depth_vis, cv2.COLORMAP_JET)
self.display_image(depth_color, self.depth_display)
self.depth_mm = filtered
except OBError as e:
self.show_error(f"帧获取失败: {str(e)}")
def toggle_D2D(self, state):
try:
self.current_device.set_bool_property(OBPropertyID.OB_PROP_SDK_DISPARITY_TO_DEPTH_BOOL, bool(state))
except OBError as e:
self.show_error(f"D2D失败: {str(e)}")
def toggle_soft_filter(self, state):
try:
self.current_device.set_bool_property(OBPropertyID.OB_PROP_DEPTH_SOFT_FILTER_BOOL, bool(state))
except OBError as e:
self.show_error(f"滤波设置失败: {str(e)}")
def reboot_device(self):
try:
self.current_device.reboot()
self.show_status("设备重启中...")
QTimer.singleShot(3000, self.reconnect_device)
except OBError as e:
self.show_error(f"重启失败: {str(e)}")
def reconnect_device(self):
try:
self.pipeline.stop()
self.init_camera()
self.show_status("设备已重新连接")
except Exception as e:
self.show_error(f"重连失败: {str(e)}")
def display_image(self, image, label):
if image is None:
return
if len(image.shape) == 2:
h, w = image.shape
q_img = QImage(image.data, w, h, w, QImage.Format_Grayscale8)
else:
h, w, ch = image.shape
rgb_img = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
q_img = QImage(rgb_img.data, w, h, ch * w, QImage.Format_RGB888)
scaled_img = q_img.scaled(label.width(), label.height(), Qt.KeepAspectRatio, Qt.SmoothTransformation)
label.setPixmap(QPixmap.fromImage(scaled_img))
def show_status(self, message):
self.statusBar().showMessage(message)
def show_error(self, message):
self.statusBar().showMessage(f"错误: {message}")
print(f"[ERROR] {message}")
def closeEvent(self, event):
if self.pipeline:
self.pipeline.stop()
event.accept()
if __name__ == "__main__":
app = QApplication(sys.argv)
window = OrbbecCameraApp()
window.show()
sys.exit(app.exec_())